Development of Soft Gripper and Body for Caterpillar-inspired Robot
Author:
Kevin Wu ’25
Co-Authors:
Faculty Mentor(s):
Prof. William Scott, Mechanical Engineering
Funding Source:
College of Engineering
Abstract
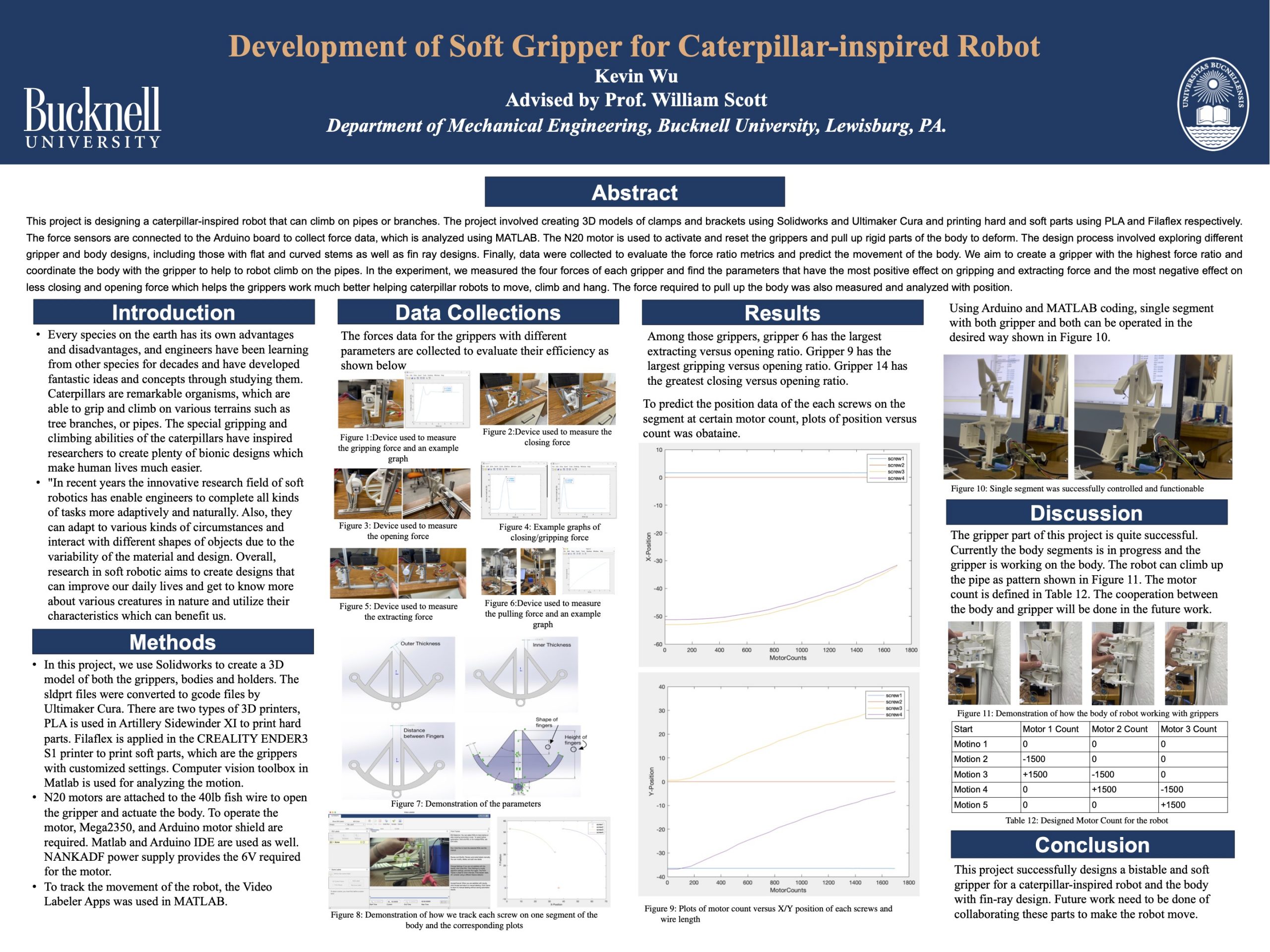
This project is designing a caterpillar-inspired robot that can climb on pipes or branches. The project involved creating 3D models of clamps and brackets using Solidworks and Ultimaker Cura and printing hard and soft parts using PLA and Filaflex respectively. The force sensors are connected to the Arduino board to collect force data, which is analyzed using MATLAB. The N20 motor is used to activate and reset the grippers and pull up rigid parts of the body to deform. The design process involved exploring different gripper and body designs, including those with flat and curved stems as well as fin ray designs. Finally, data were collected to evaluate the force ratio metrics and predict the movement of the body. We aim to create a gripper with the highest force ratio and coordinate the body with the gripper to help to robot climb on the pipes. In the experiment, we measured the four forces of each gripper and find the parameters that have the most positive effect on gripping and extracting force and the most negative effect on less closing and opening force which helps the grippers work much better helping caterpillar robots to move, climb and hang. The force required to pull up the body was also measured and analyzed with position.