Design, fabrication, and testing of a legged soft robot that can walk and jump
Author:
Kade Davidheiser ’28Co-Authors:
Faculty Mentor(s):
William Scott Mechanical engineeringFunding Source:
KalmanAbstract
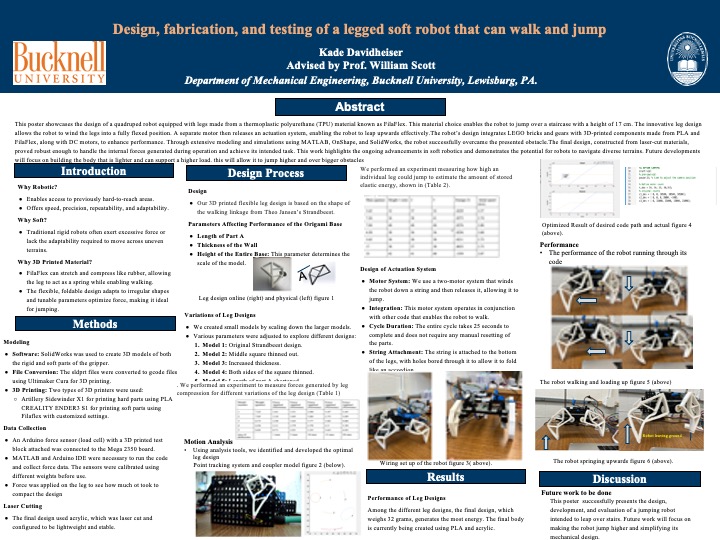
This poster showcases the design of a quadruped robot equipped with legs made from a thermoplastic polyurethane (TPU) material known as FilaFlex. This material choice enables the robot to jump over a staircase with a height of 17 cm. The innovative leg design allows the robot to wind the legs into a fully flexed position. A separate motor then releases an actuation system, enabling the robot to leap upwards effectively.The robot’s design integrates LEGO bricks and gears with 3D-printed components made from PLA and FilaFlex, along with DC motors, to enhance performance. Through extensive modeling and simulations using MATLAB, OnShape, and SolidWorks, the robot successfully overcame the presented obstacle.The final design, constructed from laser-cut materials, proved robust enough to handle the internal forces generated during operation and achieve its intended task. This work highlights the ongoing advancements in soft robotics and demonstrates the potential for robots to navigate diverse terrains. Future developments will focus on building the body that is lighter and can support a higher load. this will allow it to jump higher and over bigger obstacles