Optimizing Boundary Transformation Vectors by
Choosing the Best 2-D Representation
Author:
Quinn Zabiegalski ’26Co-Authors:
Faculty Mentor(s):
Andrew Sloboda, Mechanical EngineeringFunding Source:
Helen E. Royer Undergraduate Research FundAbstract
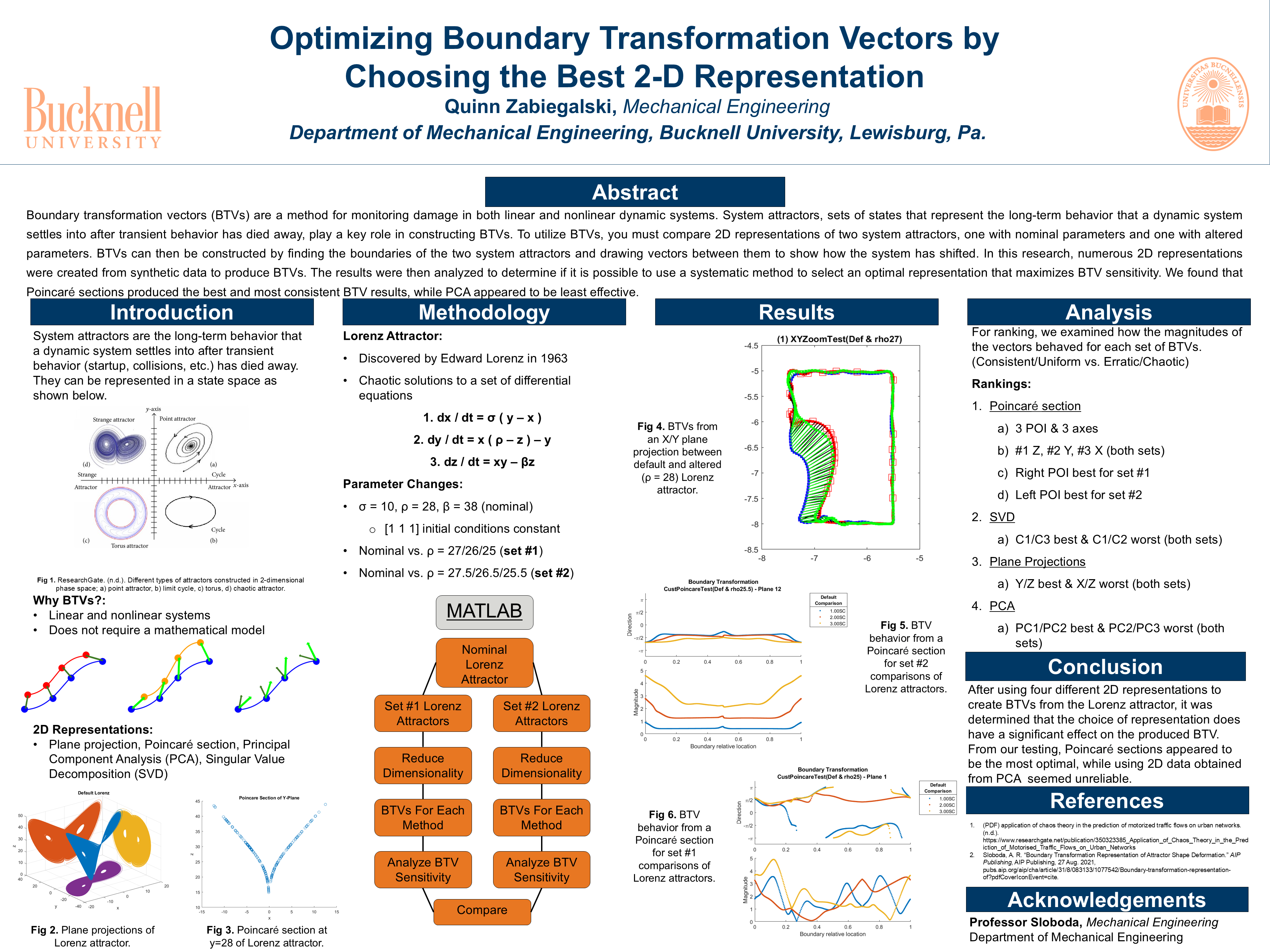
Boundary transformation vectors (BTVs) are a method tailored for analyzing damage in linear and nonlinear dynamic systems. BTVs are constructed by first comparing two system attractors-one representing the system with normal parameters and the other with altered parameters. A system attractor represents the long-term behavior that a dynamic system settles into after transient behavior has dissipated. Utilizing a 2-D representation of the system attractors, BTVs can be created by drawing vectors between the boundaries of the normal and altered attractors to illustrate system changes. The main objectives of this research were to understand the sensitivity of BTVs to different 2D attractor representations and determine an optimal representation method if given a set of data. Initially, literature regarding system attractors and their representations were reviewed. MATLAB was then used to code the four most promising representations for the system attractors, these being plane projections, Poincaré sections, principal component analysis (PCA), and singular value decomposition (SVD). The BTVs were constructed using simulated Lorenz attractor data. After successful implementation of the different representations, two comparison groups were formed. The first group involved altering the rho parameter (ρ) of the Lorenz system from its normal value (ρ = 28) to 27, 26, and 25. The second group used intermediate rho values (27.5, 26.5, and 25.5). Finally, MATLAB functions were used to evaluate the magnitude and direction of the resulting BTVs. Among the methods tested, Poincaré sections yielded the most consistent and effective BTV results, while PCA appeared least effective.